Today, technology has become more accessible than ever. While the younger generation skillfully uses
many digital tools, this doesn’t necessarily mean they deeply understand technology or use it creatively.
Many people can navigate the digital world comfortably but don’t know the logic behind its construction –
like someone who can read books but can’t write their own story.
Artificial intelligence (AI) and robotics are among the most exciting areas of emerging technology. Students
from primary school to university are increasingly interested in these fields. However, this interest doesn’t
always translate into learning. One of the main reasons is the inherently abstract nature of these
technologies. So, how can this abstraction be overcome? The answer: tangibility.
Computer science is fundamentally a theoretical discipline. Students frequently encounter abstract
concepts like algorithms, data structures, and neural networks, eventually asking, “What’s the point of
this?”. At this point, Jean Piaget’s theory of cognitive development comes into play:
The human mind – especially in the early stages of learning – tends to associate abstract knowledge with
tangible experiences.
This approach directly aligns with Seymour Papert’s educational philosophy known as “constructionism”.
According to Papert, learning is most effective when individuals engage in building something. When this
building process is both mental and physical, learning becomes more enduring. Papert’s concept of “toys
to think with” is particularly noteworthy, and robots are among the most effective examples of such tools.
Robots allow students to observe the real-world results of their code. For example, a student can see the
output of a face recognition algorithm not just as an image, but as the movements of a robot. This type of
interaction not only accelerates learning but also boosts student motivation.
However, there are some key barriers to robotics education – primarily cost and hardware requirements.
Even the most basic educational robots are sold for $300 due to their hardware. This makes implementing
a 1-to-1 robot-to-student ratio nearly impossible.
As a result, even at the postgraduate level, students rarely have the opportunity to work with real robots.
This can lead to a learning experience that remains abstract. That’s why universities often turn to
simulation-based approaches. Simulations are both more affordable and more accessible. Students can
test robot behaviors without physical hardware.
Yet simulations come with significant limitations. First, simulation environments usually reflect ideal
conditions, whereas the real world is more complex and often unpredictable. A student can only realize
that a robot’s wheels slip, sensors produce noisy data, or low battery levels affect performance through
physical experience.
Second, physical robots can increase student motivation. Seeing one’s own code influences a real-world
device enhances the learning process. This effect is particularly strong in the context of motivated learning
theory, which emphasizes the importance of learner engagement.
All these limitations highlight the importance of accessible, hands-on robotics experiences. So how can
students interact with robots under these constraints?
All these limitations highlight the importance of accessible, hands-on robotics experiences. So how can
students interact with robots under these constraints?
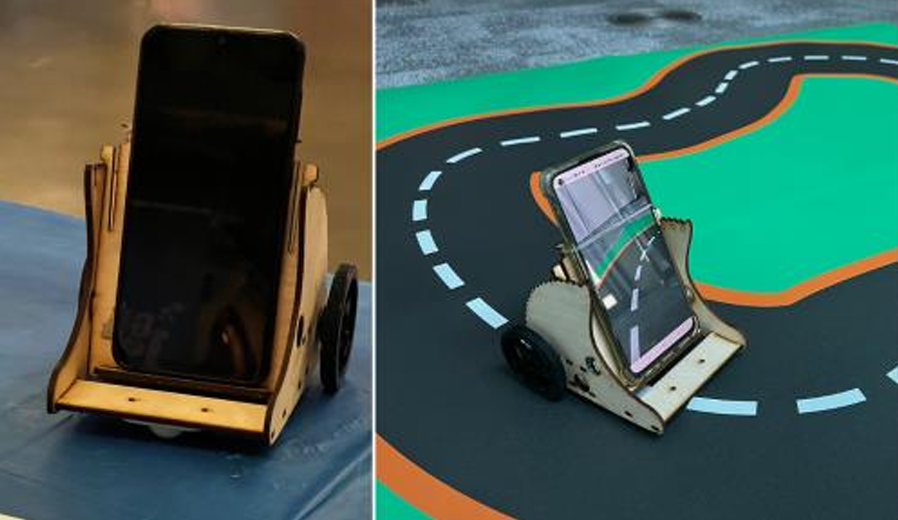
To address this, we are developing a robot called Curio at the University of Glasgow. Curio aims to deliver
the core benefits of existing robotics platforms at a lower cost. It uses students’ smartphones as both
sensors and processors to reduce hardware expenses. Curio’s design allows students to easily turn their
phones into a robotic system. Its two-wheeled structure, easy-to-assemble wooden frame, and open
source software via Bluetooth support the “use your own robot, generate your own data” approach.
To evaluate Curio’s impact, we conducted a case study with over 20 computer science students at the
University of Glasgow. 95% of participants reported an increased understanding of robotics after just one
hour. Additionally, 75% felt more confident in developing AI-based projects. These results show that Curio
can have a meaningful impact on learning and technical confidence even in a short time.
In conclusion, the widespread adoption of robotics and AI education requires not just access to
technology but also the cultivation of individuals who understand and shape it. However, high costs and
abstract content pose serious obstacles. Our Curio robot is designed as an accessible, low-cost, and
pedagogically robust alternative to overcome these barriers. Our initial field studies support this potential.
With the feedback collected, we aim to explore Curio’s educational impact further through larger-scale
implementations and classroom-based studies in the future.